Selfrionette
Only 30 seconds Concept Video – dive in!
Selfrionette: A New VR Controller for Manipulating Full-Body Avatars with Fingertip Force
Overview
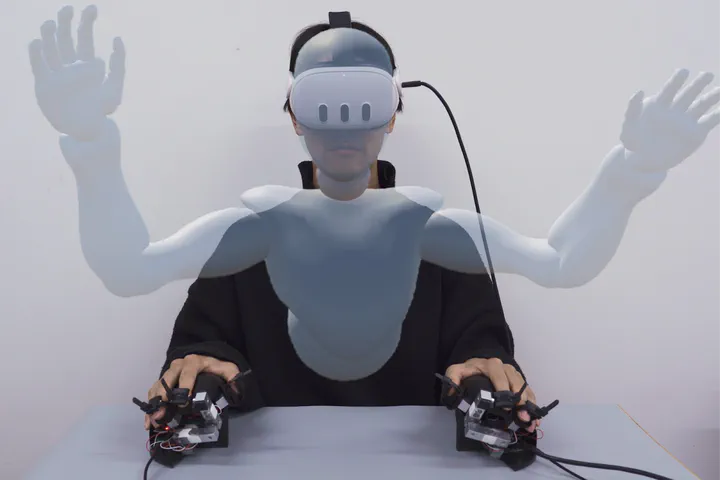
Selfrionette is an innovative controller that enables users to manipulate a full-body avatar in VR with fingertip force input. This system overcomes physical and spatial constraints while achieving diverse and highly dynamic haptic interactions.
Interaction with virtual objects using Selfrionette.
Key Features
1. Fingertip Force Input
Selfrionette uses seven single-beam load cells per hand to measure fingertip forces. These sensors are embedded in a spherical casing, allowing for natural hand postures during operation. Each load cell can detect forces of up to 20kg, converting them into digital signals at 80Hz via an HX711 chip, which are then read by a microcontroller.
Degrees of Freedom (DoF):
- Thumb and Index Finger: 3 DoF each (up/down, forward/backward, left/right), corresponding to arm and leg movements.
- Pinky Finger: 1 DoF (pressing), corresponding to object grasping.
Using both hands, users can achieve up to 14 DoF for full-body control.

Mouse-shaped Input Interface
2. Translating Force to Motion
Forces measured at the fingertips are converted into avatar movements in VR. This translation is achieved in real-time using inverse kinematics (IK).
Avatar Motion Generation Equation
The avatar’s motion is described as follows:
- : Force applied to the load cell
- : Force acting on the target point (limb endpoint) in the virtual space
- : Virtual mass
- : Damping and spring constants
- : Avatar limb’s initial position
This model allows for intuitive and highly responsive control based on fingertip force input.
3. Haptic Feedback Representation
In addition to motion generation, Selfrionette incorporates the simulation of haptic properties (e.g., weight, friction, elasticity) to enhance the realism of virtual object interactions.
Additional Forces for Haptic Feedback
The motion equation for generating haptic feedback is expressed as follows:
- : Additional force representing haptic properties.
Each haptic property is implemented as follows:
1. Weight
Weight is represented by incorporating acceleration and gravity:
- : Virtual object’s mass
- : Gravitational acceleration
2. Friction
Surface friction is modeled as:
- : Parallel force
- : Normal force
- : Static and kinetic friction coefficients
3. Compliance
Elasticity is expressed using spring properties:
- : Contact point
- : Spring constant
This allows users to feel soft objects and elastic materials realistically.
Publications
UIST 2024
- Title: Selfrionette: A Fingertip Force-Input Controller for Continuous Full-Body Avatar Manipulation and Diverse Haptic Interactions
- Authors: Takeru Hashimoto, Yutaro Hirao
- Paper URL
VRSJ 2024
- Title: Selfrionette: Realizing Full-Body Avatar Manipulation and Diverse Haptic Interactions with Fingertip Force Input
- Authors: Yutaro Hirao, Takeru Hashimoto
- Paper URL
Media Coverage
Denpa Shimbun
Creating “Sensory Experiences”: Avatar Operation and Haptic Reproduction with Selfrionette
Nikkan Kogyo Shimbun
Avatar Control with Fingers: Collaborative Development by NAIST and Sony CSL