MetamorphX
Aug 27, 2022
·
1 min read
Concepts
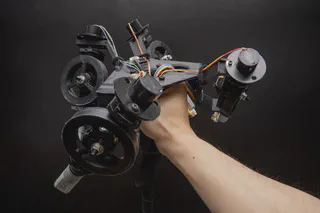
The shape of a grasped object that humans perceive haptically is affected by the object’s impedance. In this project, we have developed a handheld VR controller “MetamorphX” that can reproduce the impedance of various virtual objects. MetamorphX generates torque in response to human movement. We attempted to make the user perceive dynamically generated torque as a static property of the object.