Rubik's Cube Solver
Dec 27, 2016
·
1 min read
About
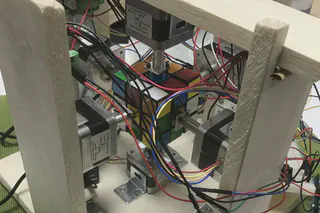
Created in an project (class) of the Department of Mechanical and Information Engineering, Faculty of Engineering.
It uses two webcams to recognize the initial state of a Rubik’s cube and derives a solution using an existing solver. The six arms are rotated according to the method to complete the Rubik’s Cube.