About Me
橋本健は現在、SB IntuitionsのResearch Scientistとして勤務しています。東京大学でコンピュータサイエンス、ヒューマンコンピュータインタラクション、ロボット工学を学び,それらを統合してウェアラブルな力覚インタフェースの作製やそれが引き起こす知覚・認知の変容の研究を行っていました。2023年に博士(情報理工学)、2020年に修士(情報理工学)、2018年に学士(機械情報学)を東京大学から取得しています。受賞歴には日本バーチャルリアリティ学会学術奨励賞やSIGCHI Best Paper Honorable Mentions Award等があります。現在の研究分野は、力の入力や出力に着目した現実感の拡張や再構成の研究です。現実空間の物理性(Physicality)をいかに拡張・再構成していけるのかに興味があり、Beyond Physicalityというビジョンで研究に取り組んでいます。
Education
博士(情報理工学)
東京大学
修士(情報理工学)
東京大学
学士(機械情報学)
東京大学
Interests
バーチャルリアリティ
力覚提示装置
身体の再構成
力覚による人間の拡張
人間とAIの統合
Vision – Beyond Physicality –
自己の肉体という物理性(Physicality)は我々がこの世界に生きていることを感じさせる非常に重要な要素でありながら、それは同時に私たち自身の知覚、認知、能力の境界を決めるものでもありました。
一方で、テクノロジーが進歩するにつれ、これら固定されていた境界を超えることができるようになりつつあります。
Beyond Physicalityは、人間の身体を静的で生物学的な「モノ」としてではなく、世界と相互作用するための動的でカスタマイズ可能なインターフェースとして拡張・再構想する方法を探求します。
このパラダイムでは、身体は拡張、再形成、さらには「交換」さえ可能なものとなり、私たちの物理的な存在とアイデンティティのつながりに問いかけ、自己の再構築を迫るものになるかもしれません。
プロジェクト
私はものづくりを楽しんでいます。



学術論文

(2026).
Shall We Dance? Resonance of Intentions with an Embodied Agent based on the Free Energy Principle.
ACM SIGGRAPH 2026 Conference Emerging Technologies.

(2026).
Flying at Your Fingertips: Demonstration of Fingertip Force-Based 3D Locomotion.
The Augmented Humans International Conference 2026 (AHs 2026) — Demonstration.

(2026).
Flying at Your Fingertips: Input Mapping Strategies for Fingertip Force-Based 3D Locomotion.
The Augmented Humans International Conference 2026 (AHs 2026).
(2025).
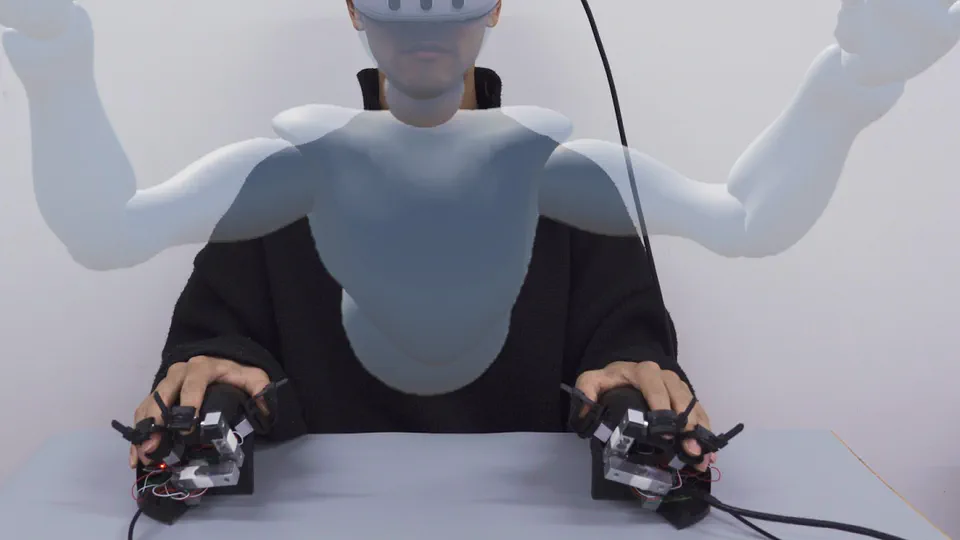
SyncLimbs: Semi-automatic Supernumerary Limbs Control System through Motion Synchronization for Enhanced Agency.
Proceedings of the SIGGRAPH Asia 2025 Emerging Technologies.

(2025).
Move Like an Ammonite: Personalizing Force Feedback for Avatar Embodiment in Virtual Reality.
2025 IEEE International Symposium on Mixed and Augmented Reality (ISMAR).
最近のニュース