SomatoShift

Concept: Haptic Avatar
Advancements in haptic technology have enabled the expression of haptic experiences in virtual reality, such as the sensation of touching an object or holding a tool. Haptic technologies have found wide use in simulating interactions between humans and the physical world. Furthermore, ongoing research is exploring ways to allow individuals to experience bodily sensations other than their own. Virtual reality (VR) technology has facilitated the creation of avatars, visual representations that can embody multiple versions of oneself. By modifying not only an avatar’s appearance but also its proprioceptive sensations — the internal bodily feelings — it becomes feasible to generate the impression of inhabiting a completely new body. The goal of this study is to modify participants’ proprioceptive perception of their own bodies by appropriately intervening in their movements using a force feedback device. Our aim is to create an experience that goes beyond the physical limitations of the body, which is one of the many constraints humans. We believe this approach offers individuals an opportunity to liberate themselves from their physical bodily limitations.
SomatoMotor Reconfiguration
Our system intervenes in a user’s movement at strategic moments, giving rise to the sensation that the physical characteristics of their bodies have a change, as opposed to experiencing an external force being applied.
We call this change in the relationship between somatosensory and motor sensations as somatomotor reconfiguration.
To achieve this, we utilized impedance control, which modifies the static properties of an object as force information.
Our previous study has shown that this can modify environmental properties.
Similarly, we hypothesized that attaching a wearable force feedback device and providing force feedback in conjunction with movement could alter their joint motion, resulting in a change in body perception.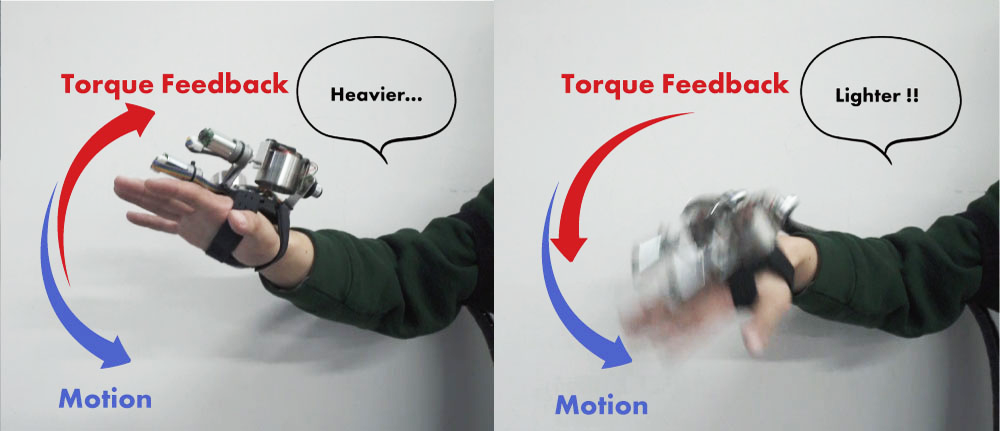
Hardware
We have developed a wearable hardware prototype equipped with control moment gyroscopes (CMG), which produce torque from a spinning flywheel to deliver immediate force feedback in response to human movement.
The mechanism and specifications of the device are shown in below figure.
The weight of the wearable device was a critical consideration in its design, and following several prototype iterations, the final weight was brought down to 350g.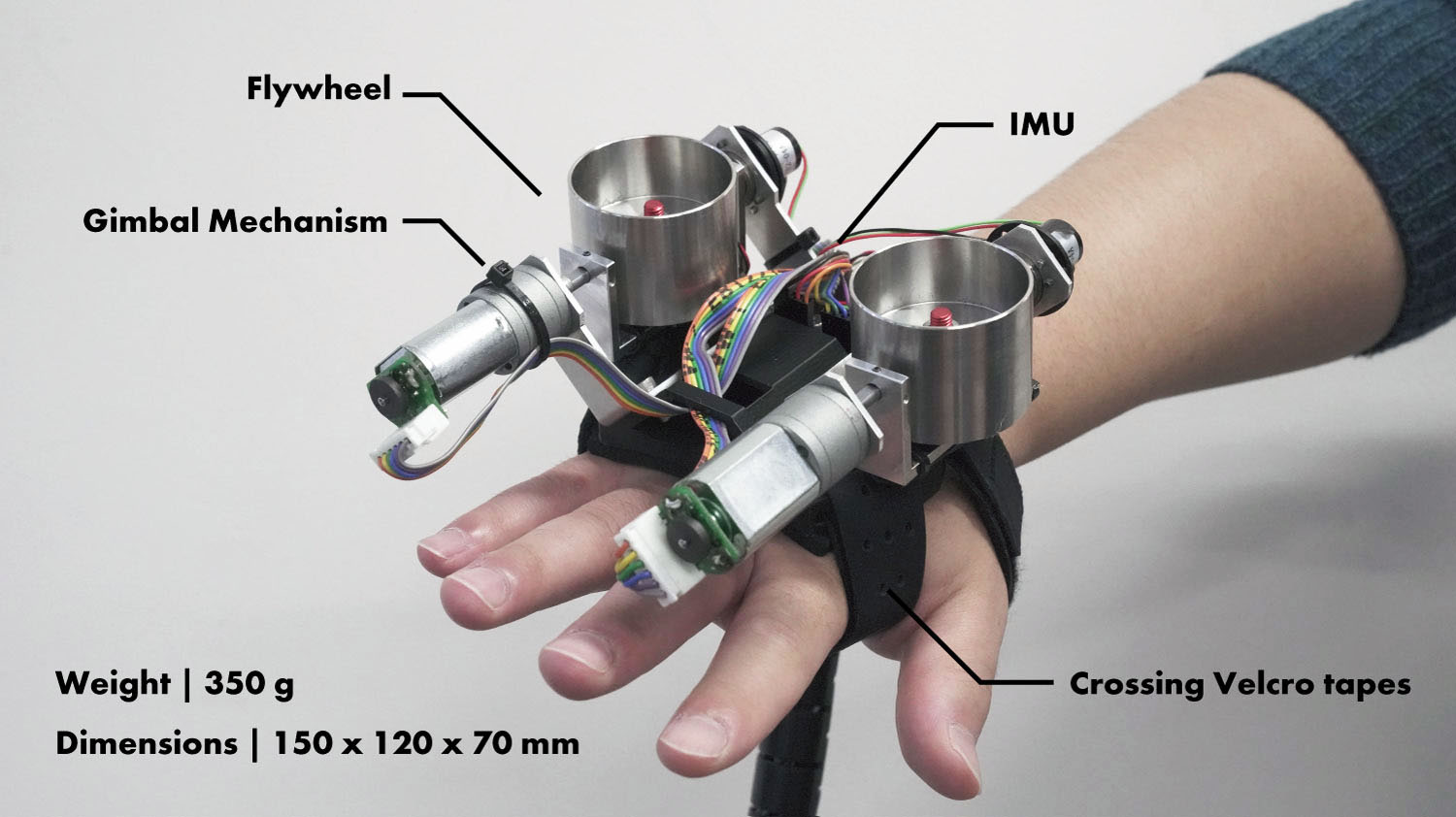
Video
Media
Light as a Feather: An Altered Human Somatic Experience https://blog.siggraph.org/2023/06/light-as-a-feather-an-altered-human-somatic-experience.html/